Der Allrounder
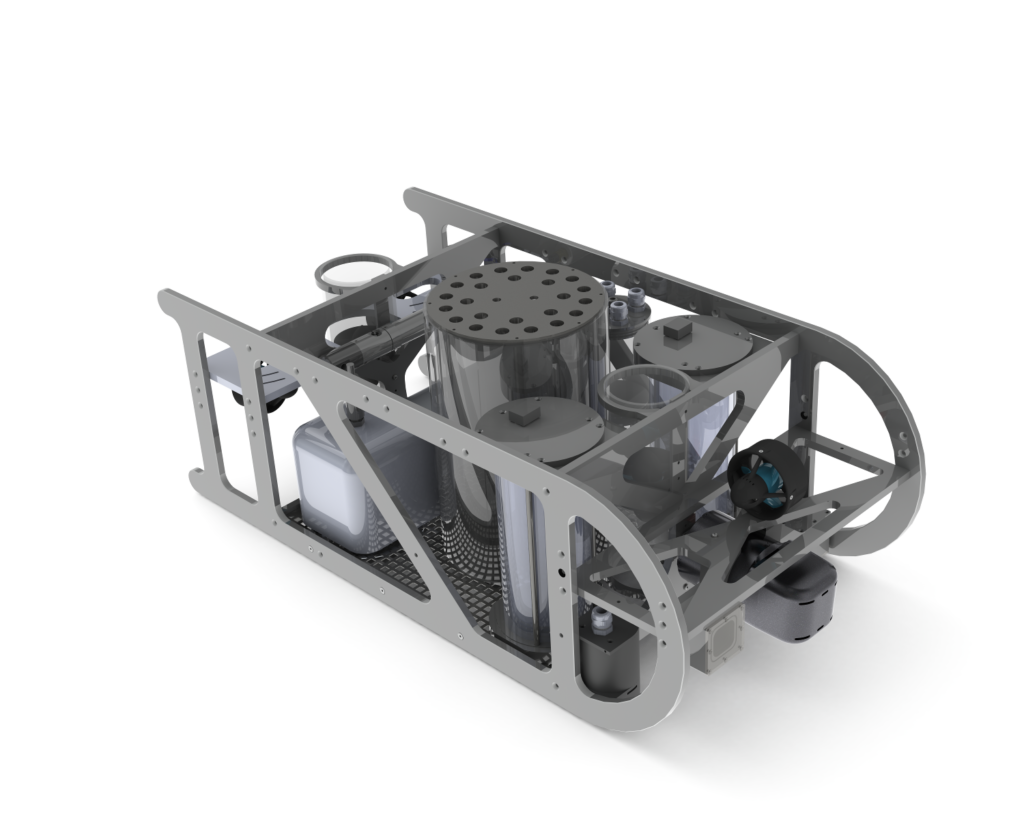
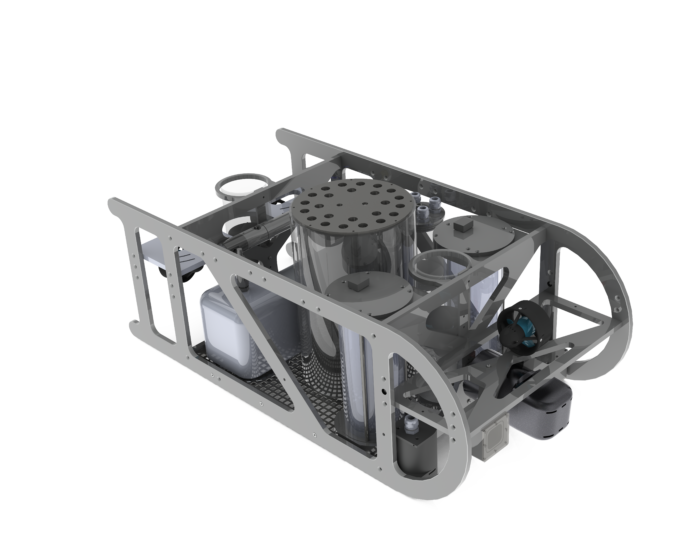
Das AUV Robbe 131 wird seit 2013 an der Fachhochschule Kiel entwickelt. Ausgelegt wurde es als modulare Plattform, zum Test und zur Entwicklung von verschiedenen Sensoren.
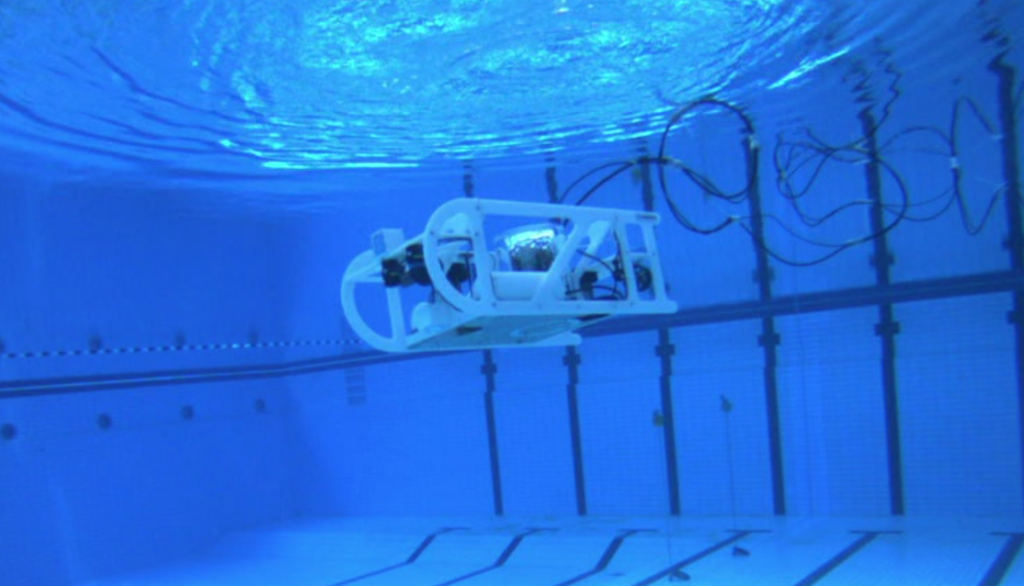
Seit 2014 wurde es jährlich durch das AUV Team TomKyle bei den SAUC-E (2014 – 2016) und European Robotics League Emergency (2017-2018) Wettbewerben eingesetzt.
| Maße | 1 m x 0,7 m x 0,5 m |
| Gewicht | ca. 60 kg |
| Tauchtiefe | 20 m mit verbautem Schaum |
| Bauzeitraum | ab 2013 |
| Hauptrechner | mini-ITX Mainboard mit Intel i7-4790 mit 8 GB RAM und 256 GB SSD |
| Sensoren | Multibeam Sonar BlueView M900-130 Farbkameras IDS UI-3241LE nach vorne und unten Teledyne Explorer DVL für Geschwindigkeit und Höhe über Grund Drucksensor Keller PA33X Leitfähigkeitssensor Valeport MiniCT Attitude Heading Reference System XSens MTi-10 |
| Kommunikation | Ethernet-Kabel (50 m) WLAN akustische Kommunikation Tritech Micron Modem |
| Akkumulator | 2 x SubCtech Akkus 21V/30Ah, gesponsert nach dem SAUC-E 2014 |
| Antriebe | 6 x BlueRobotics T200 Brushless Thruster |
| Freiheitsgrade | drei translatorische Achsen (längs, quer, hoch) zwei rotatorische Achsen (Nicken, Gieren) |
| Mechanik | Rahmen aus gefrästen PE-Platten Druckkörper aus POM-Rohr mit Deckel aus Edelstahl (V4A) Bodenblech aus Edelstahl (V4A) |