Allrounder
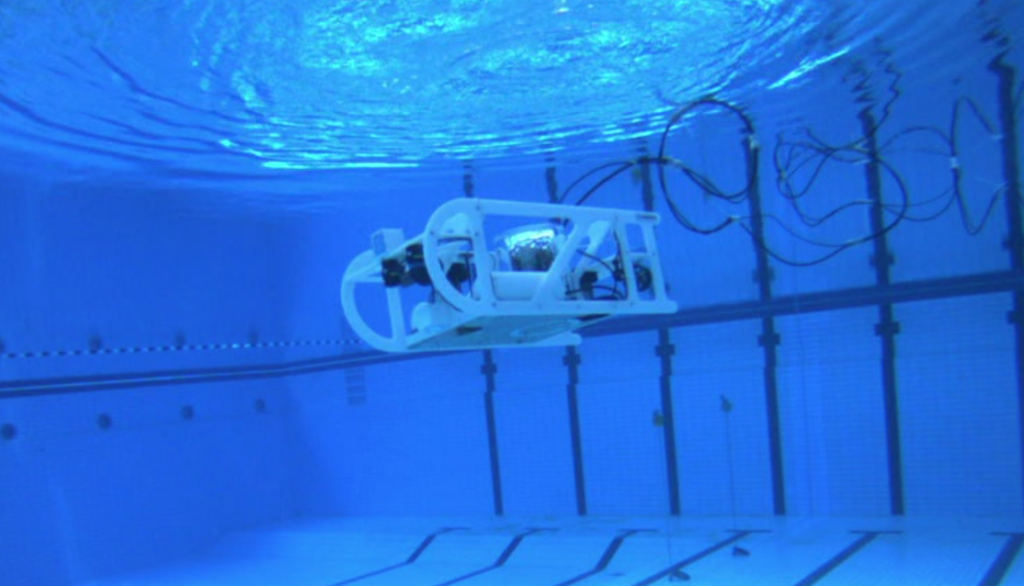
The autonomous underwater vehicle (AUV) Robbe 131 has been developed at the University of Applied Sciences Kiel since 2013. It is designed as a modular platform for test and development of several sensors.
Since 2013 the vehicle has been used annually by AUV Team TomKyle in SAUC-E (2014 – 2016) and European Robotics League Emergency (2017-2018) competitions.
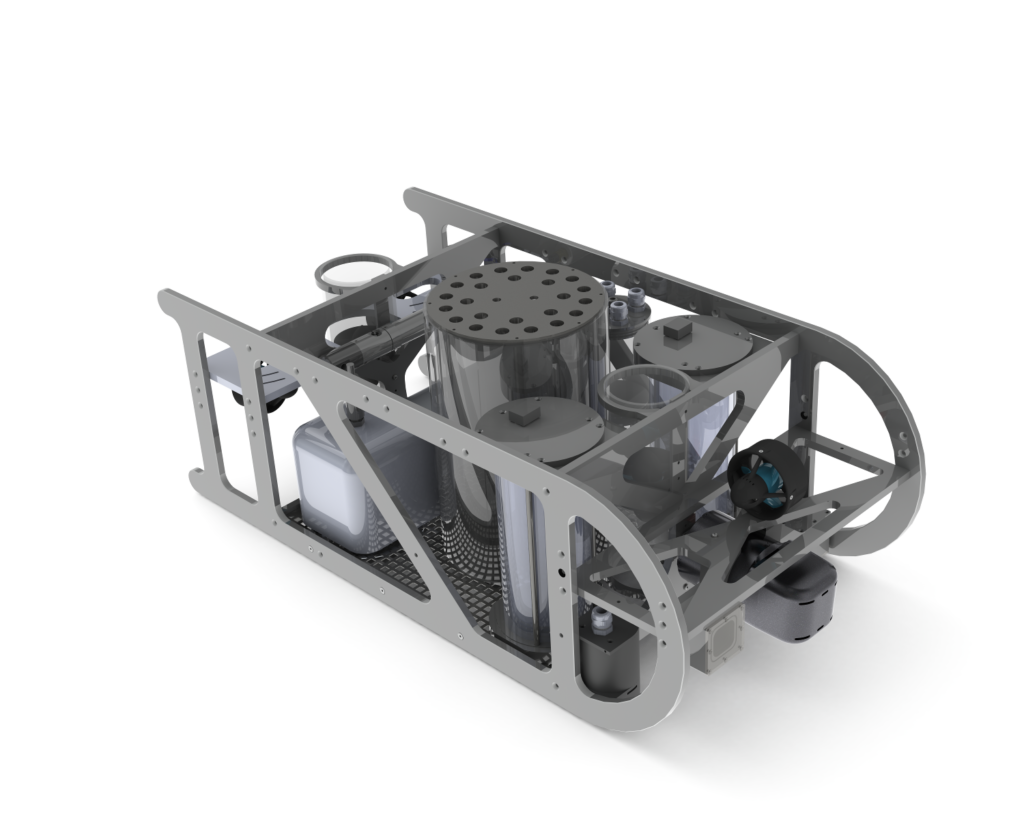
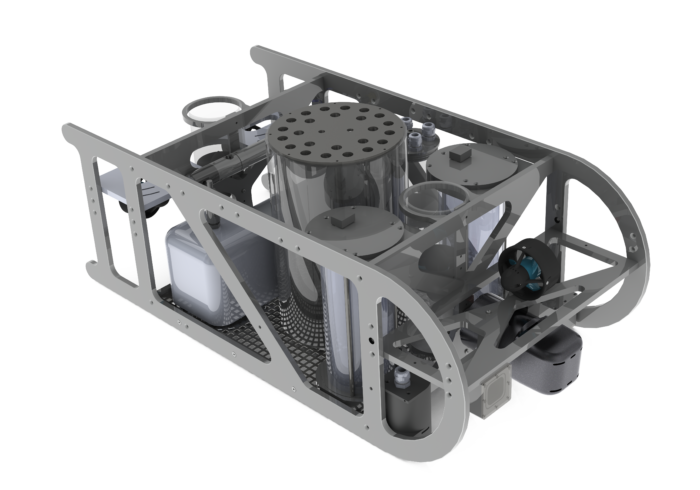
| Dimensions | 1 m x 0.7 m x 0.5 m |
| Weight | approx. 60 kg |
| Diving depth | 20 m with installed buoyancy foam |
| Construction time | since 2013 |
| Main computer | mini-ITX mainboard with Intel i7-4790 and 8 GB RAM, 256 GB SSD |
| Sensors | Multibeam sonar BlueView M900-130 Color camera IDS UI-3241LE to front and downwards Teledyne Explorer DVL for speed and height over ground Pressure sensor Keller PA33X Conductivity sensor Valeport MiniCT Attitude heading reference system MTi-10 |
| Communication | Ethernet cable (50 m) WiFi Acoustic communication via Tritech Micron Modem |
| Battery | 2 x SubCteck batteries with 21 V / 30 Ah, sponsored after SAUC-E 2014 |
| Propulsion | 6 x BlueRobotics T200 brushless thruster |
| Degrees of freedom | Three translational axes (heave, surge, sway) Two rotational axes (pitch, yaw) |
| Mechanics | Frame of milled PE plates Pressure hull of POM pipe with Cap of stainless steel (V4A) Bottom plate of stainless steel (V4A) |