
Employees

Lars M. Wolff
Sensors, Navigation. Lars M. Wolff works in many fields of interfaces to…
Thomas Cimiega
SONAR, Algorithm Thomas Cimiegas work focusses on SONAR-data processing and collision avoidance.…
Jonni Westphalen
IT, Intersystem communication Jonni Westphalen works in various fields of the team…
Uwe B. Ruhland
Circuit Board Design, µC Programming, Team Management Uwe develops circuit boards for…
Max Stickel
Actuator Engineering, Construction Max Stickel studied mechatronics and finished with Bachelor degree.…
Dr. Sabah Badri-Hoeher, Prof.
Teamleader Dr. Sabah Badri-Hoeher is head of the digital signal processing group…
Torben Klatte
PCB design, µC programming Torben develops circuit boards and takes care of…
Jan Marques Bockholt
Microcontroller, Circuitboards Jan Marques Bockholt is working on an underwater-modem at the…
Daniel Grabowski
Hardware, Electronics Daniel Grabowski currently developes the electronic components for the Rucksack…Products
Robbe 131
Allrounder The autonomous underwater vehicle (AUV) Robbe 131 has been developed at…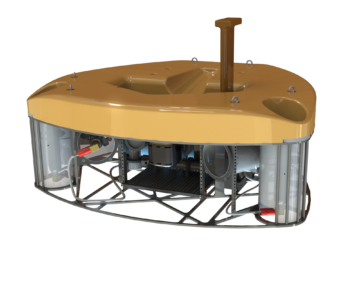
HeliROV
The Offshore Inspector HeliROV has been developed since 2015 to inspect offshore…
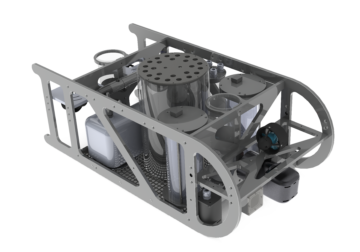
Rucksack AUV
The Lightweight The Rucksack AUV is the second generation of AUVs of…Latest News

The first steps…
After the Rucksack AUV proved its functionality and watertightness, the AUV-Team-TomKyle proceeded with the first field trial. Successfully! But as often the reality is something different as a testing environment: Our data transmission wire got tangeled up in boulders of […]