
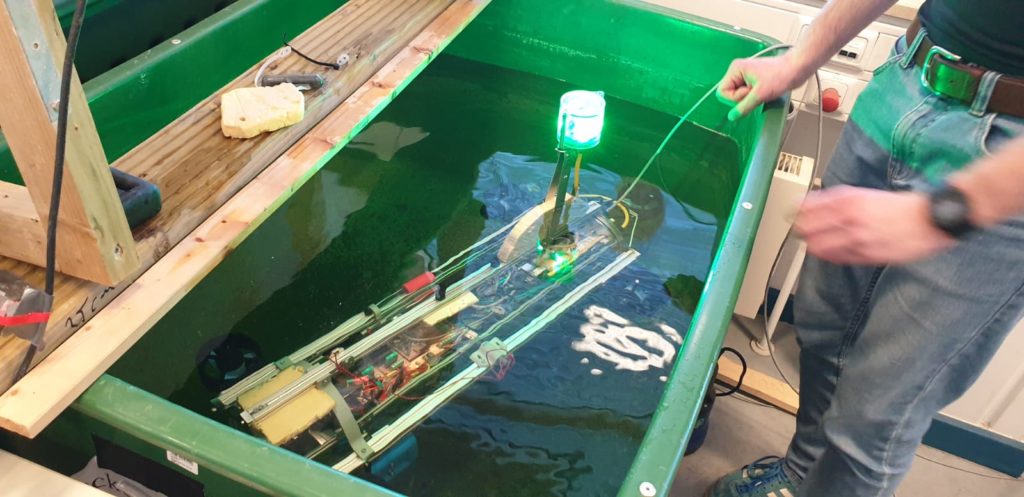
Das Rucksack AUV hat, nachdem es seine allgemeine Funktionalität und Dichtigkeit im Testbecken unter Beweis stellen konnte, heute seinen ersten Tauchgang im ROV-Betrieb in der Schwentine vollführt. Auch hier konnte man wieder mal sehen: Die raue See ist wieder mal was anderes, als ein Testbecken. Das Datenkabel verhedderte sich unter Wasser und unter 1,20 m Tauchtiefe dachte das Fahrzeug, es sei in 600 m Tiefe und versuchte panisch aufzutauchen. Zudem ist auch das Sensorboard – die Schaltzentrale der meisten Sensorik – plötzlich ausgefallen.

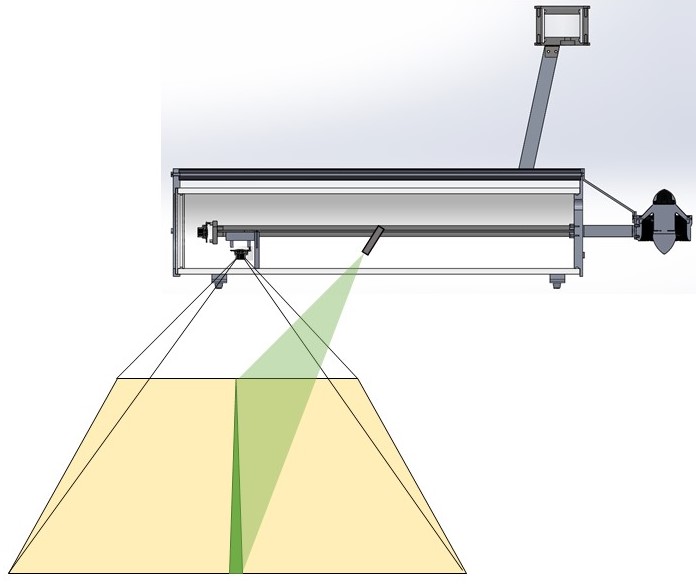
Doch nachdem wir alles einmal neu gestartet haben und die Ungereimtheiten erkannten, konnten wir einige flotte Touren fahren und viele Daten sammeln. Insbesondere für das neuartige Laseraltimetersystem, welches momentan in einer Abschlussarbeit entwickelt wird, war dies der erste Feldtest.
Alles in allem sind wir mit dem heutigen Versuch sehr zufrieden. Die allgemeine Aktuatorik und Sensorik funktionierte wie gewünscht. Das Fahrzeug ist dicht und lässt sich gut steuern.