
Das AUV-Team-TomKyle bat auch dieses Jahr einen Kurs in den Interdisziplinären Wochen (IDW) der Fachhochschule Kiel an. “Künstliche Intelligenz trifft auf Unterwasser Robotik” war nicht nur der Kursname, sondern auch Programm: Neben Vorträgen des Teams über die Unterwasserwelt, AUVs, Sensordatenverarbeitung und künstlicher Intelligenz wurde den Teilnehmern auch in Workshops, Laboren und Feldtests die Entwicklung und Verarbeitung von AUVs näher gebracht.

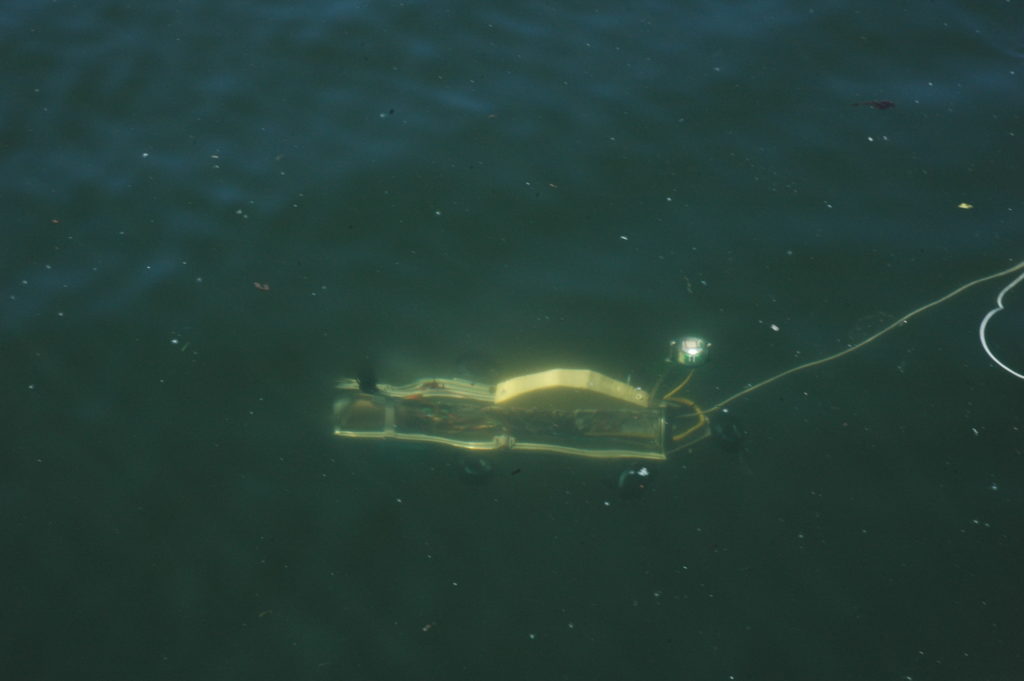
Highlight der Veranstaltung war der Feldtest des Rucksack AUVs und des dazugehörigen Tritech Micron Sonars. Bei einem Ausflug an die Kieler Schwentine konnten die Studierenden live dabei sein, wie das AUV die ersten, autonomen Schritte im Wasser vollführte. Dabei war eine ferngesteuerte Fahrt für jeden der 12 Teilnehmer auch noch mit drin. Außerdem erkannten sie beim Sonartestversuch, wie eindrucksvoll aber auch äußerst kompliziert Sonarbilder zu interpretieren sind. Dabei wurde der Gewässergrund, das Ufer und eine Boje detektiert und in Hinblick auf ihre Qualität bewertet.


Zum Abschluss wurde bei typischem Kieler Flair (Regen) gegrillt und über das Team, Technik, die vergangenen Tage oder über das Studium im allgemeinen philosophiert.

Teilnehmer steuert das AUV 





Auswerfen der Boje 
Wir freuen uns, interessierten Studierenden die faszinierende Welt der Unterwassertechnik in dieser Woche näher gebracht zu haben.
Einige Eindrücke und Auswertungen der von den Teilnehmern gesammelten Daten:
Ungewöhnliche Formation 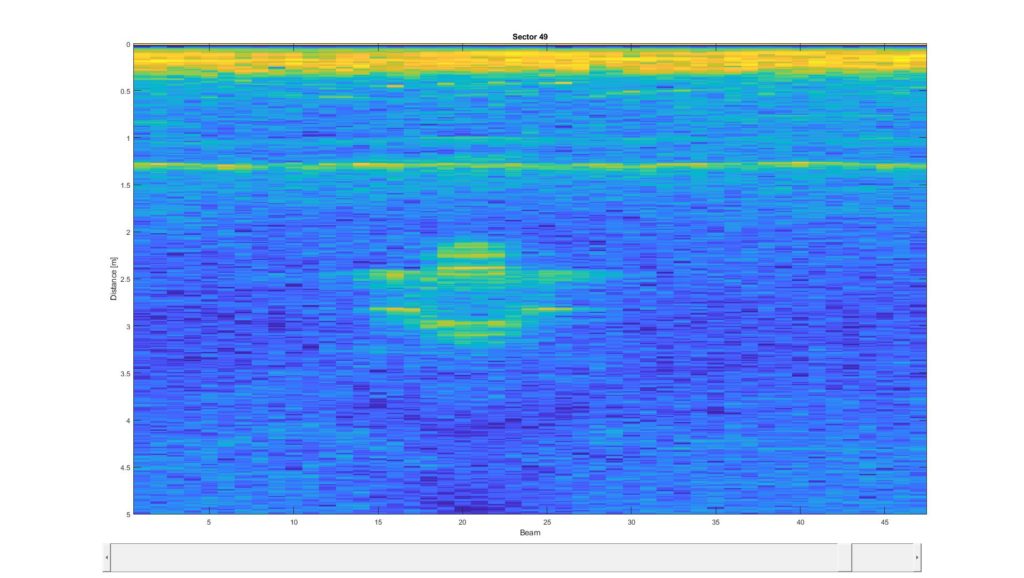
Das Rucksack AUV auf dem Sonar 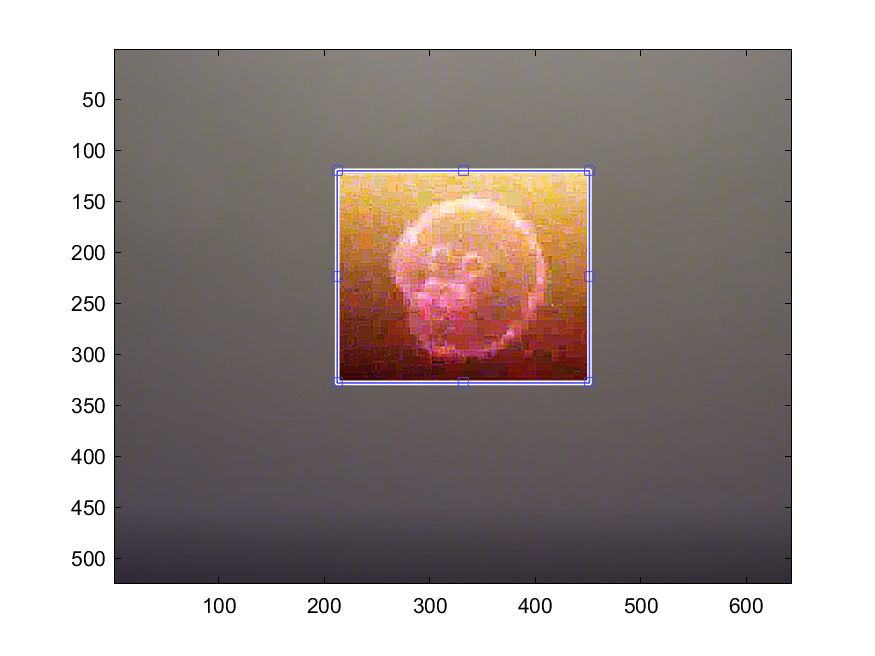
Qualle nach Bildverbesserung 
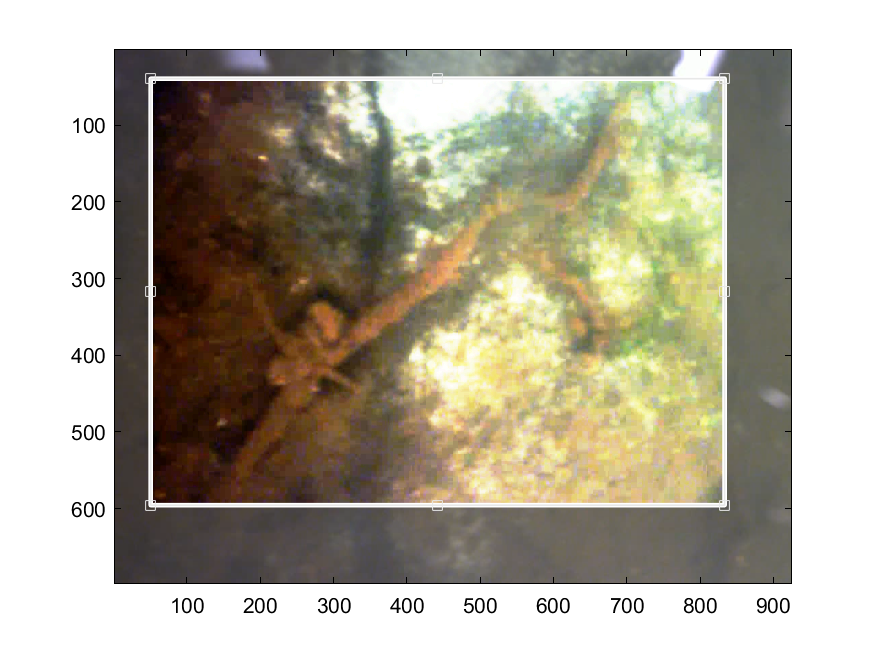
Rohrzange 
Meeresgrund 
Krebs 
Krebs & Seestern 
Seestern 
Leiter
Eine Auswertung der Sonardateien zeigte, dass wir Bojen erkennen können: Im Bild links unten ist das originale Sonarbild zu sehen. Darauf wurde eine Schätzung des Hintergrunds angewendet (siehe Bild links oben), um diesen vom Sonarbild wieder abzuziehen. Das Resultat daraus wird mit einem Filter weichgezeichnet (rechts unten).
Von oben (~20 m Entfernung) wird die Boje immer näher an das Sonar gezogen. Dabei wird das Seil, mit dem das Sonar gezogen, ebenfalls nach einer Zeit sichtbar. Zudem schwimmt noch zwischenzeitig ein Fisch durch das Bild.