
Wir waren fleißig und haben mit Hilfe unserer Studenten einige Neuerungen in das Rucksack AUV einbringen können:
Stereoskopie
Alya arbeitet an ihrer Projektarbeit an einer Entfernungsschätzung zum Meeresboden mit Hilfe von Stereoskopie. Dazu wurden zwei Kameras in eine selbst erstellte Halterung in den Druckkörper des Fahrzeugs eingebaut. Dieses Verfahren, bekannt aus der Filmtechnik, soll es uns neben der Entfernungsschätzung auch in zukünftigen Projekten ermöglichen, dreidimensionale optische Karten des Meeresbodens zu erstellen. Für erste Resultate haben wir einen Test in der Schwentine durchgeführt und die Kamera kalibriert:


Mit Hilfe des Anaglyphen-Verfahren und entsprechenden Brillen konnten wir die Resultate in 3D begutachten:

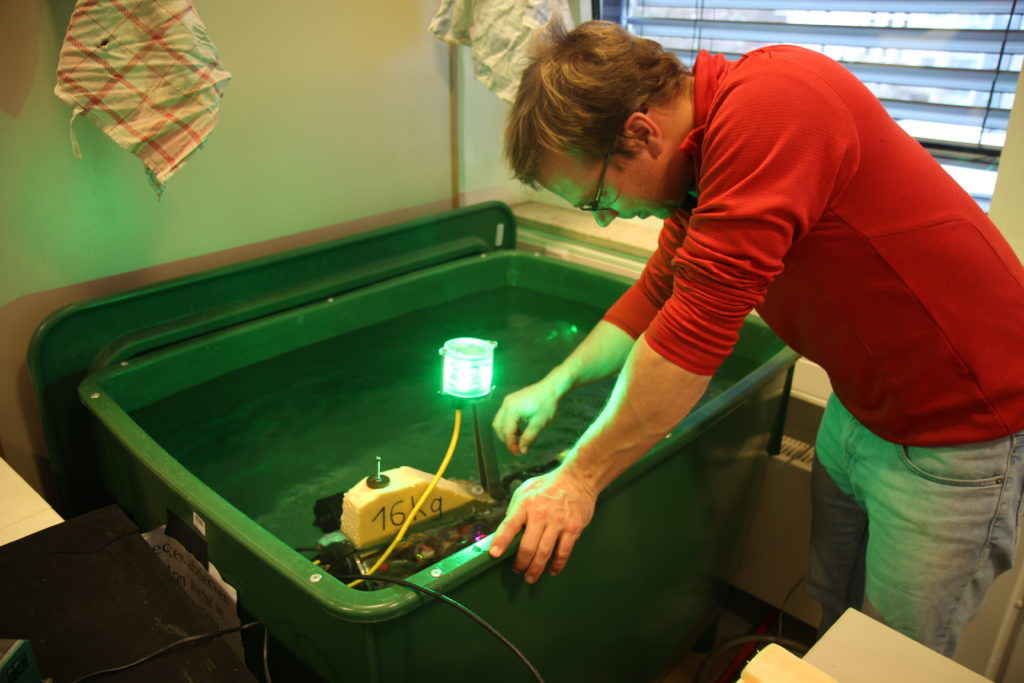
Modem
Zudem haben wir ein Unterwassermodem getestet, mit dem zwei Unterwasserknoten miteinander per Wasserschall kommunizieren können. Doch warum verwendet man Wasserschall? Warum kein Funk?
Da unter Wasser elektromagnetische Wellen stark gedämpft werden, fallen herkömmliche Kommunikationswege per Funk aus. Schall hingegen hat sich als einzige Möglichkeit etabliert, um über Distanzen von 15 m bis hin zu mehreren Kilometern zu kommunizieren. Andere Methoden (Funk, magnetische Wellen, Licht, Laser) erreichen maximal 15 m und hängen stark von der Trübung und Leitfähigkeit des Wassers ab. Um unter Wasser nun sinnvoll Daten per Schall austauschen zu können, müssen die Daten mit Hilfe eines Protokolls verschickt werden – gewährleistet durch das Unterwassermodem. Letztendlich konnten wir in der Schwentine zwei Knoten mit einer Distanz bis 170 m Daten austauschen lassen.




Parallel dazu wird an einer Unterwassermodem-Eigenentwicklung gearbeitet. Torben und Jan sind eifrig dabei, dieses zu entwerfen. Erste Schaltpläne und Modulprototypen sind in Arbeit.

Electronic Speed Controller
Daneben entwickelt Max während seiner Bachelorarbeit einen Electronic Speed Controller (ESC) – ein Bauteil, mit dem die Propeller-Drehzahl gesteuert und gemessen werden kann – und bringt dabei einige innovative Ansätze mit ein. Der Markt der ESCs fokussiert sich überwiegend auf andere Zielgruppen: Landfahrzeuge, Drohnen, (Modell-)Boote, etc. Wo hingegen ESCs für Thruster selten anzutreffen sind und auch nicht auf die Bedürfnisse des Kunden – unter anderem wir – passen.

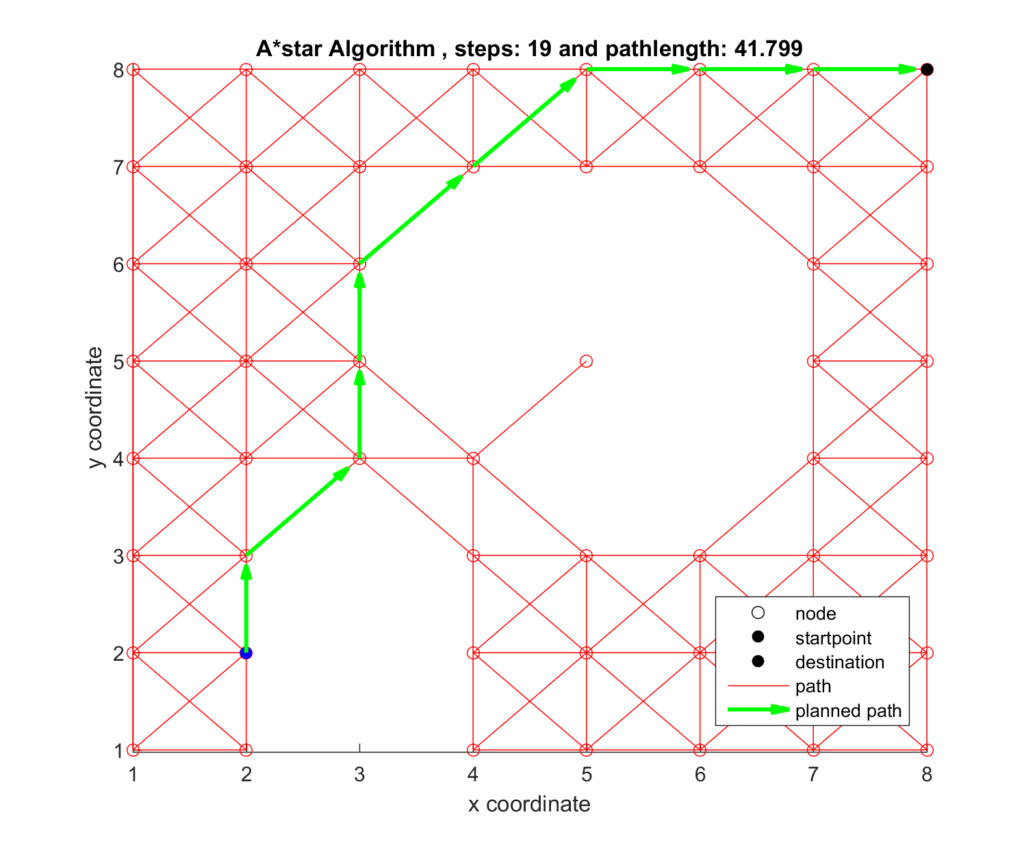
Kollisionsvermeidung
Einen großen Schritt in Richtung Autonomie setzt gerade Nils in seiner Projektarbeit um. Mit Hilfe des Sonars soll das Rucksack AUV Hindernisse erkennen und selbstständig eine alternative Route anbieten. Den ersten Schritt hat er durch die Implementierung des A-Star Algorithmus getan. Hierbei findet der Algorithmus vom Startpunkt (blau) den kürzesten Weg über die Knotenpunkte (rot) zum Ziel (schwarz). Der kürzeste Weg wird hierbei über die grünen Pfeile angezeigt.
Druckkörper Materialien
Mathias Untersucht in seiner Masterarbeit Druckkörper-Materialien, die für 200 m Tauchtiefe geeignet sind. „Aber gibt es dazu nicht Formeln und Kennwerte und kann das nicht im Voraus berechnen?“ fragt sich der Leser vielleicht. Nun die Antwort ist Jain. Es gibt Formeln, welche allerdings sehr rudimentär sind und es gibt Kennwerte, die aber sehr allgemein und nicht werksstoffspezifisch sind. So testet Mathias nun mit Hilfe eines mit Sensoren ausgestatteten Testdruckkörpers die Krafteinwirkung.
Powerboard
An einer zweiten, verbesserten Version des Powerboards arbeitet gerade Daniel. Da wir bereits an der nächsten Generation von AUVs arbeiten, wollten wir auch hier einige Updates einbringen.

Soweit zu unseren laufenden Projekten. Wir halten euch auf dem Laufenden.
Das AUV-Team und insbesondere Santa RAUV und sein Schlitten Robbe131 hoffen, Ihr hattet schöne Feiertage und wünschen Euch einen guten Rutsch!
