
Es war eine lange, harte Woche mit Pleiten und Pannen, doch am Ende konnte das AUV-Team zusammen mit Telerob den Sieg in der Grand Challange bei der European Robotics League 2019 erlangen. Doch fangen wir von vorne an:
In diesem Wettbewerb wird ein Unfallszenario simuliert, bei dem eine Yacht beim Andocken verunglückt ist. Dabei sind Hafenarbeiter eingeklemmt oder ins Wasser gefallen, ein Gasleck/Feuer ist unter Wasser aufgetreten und überall liegen Trümmerteile.
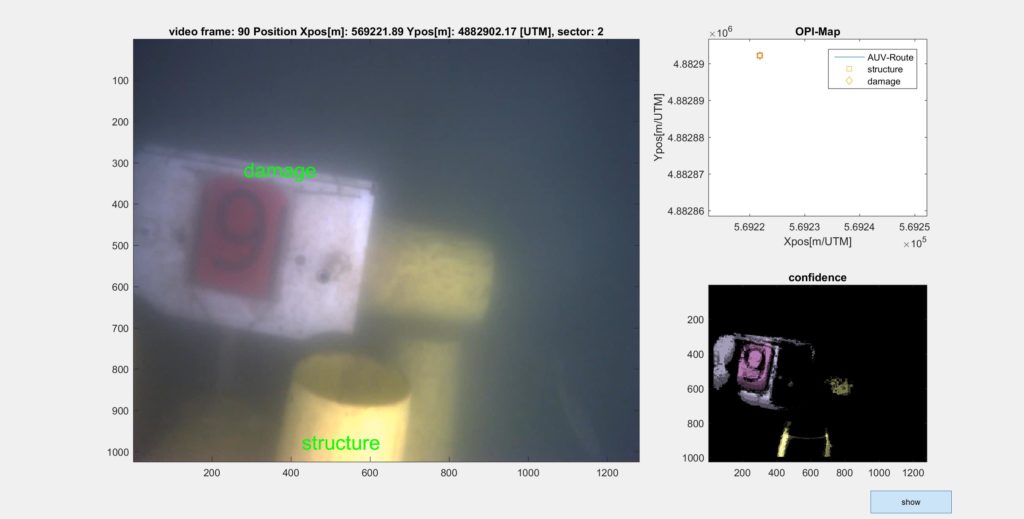
Nun gilt es, dass ein AUV und ein Landroboter die Situation aufklären, den Hindernissen ausweichen, Menschen identifizieren und Gefahrensituationen entschärfen. So soll z.B. das AUV das “Feuer” in der Pipelinestruktur ausfindig machen und dem Landroboter mitteilen, welches Ventil es schließen soll.
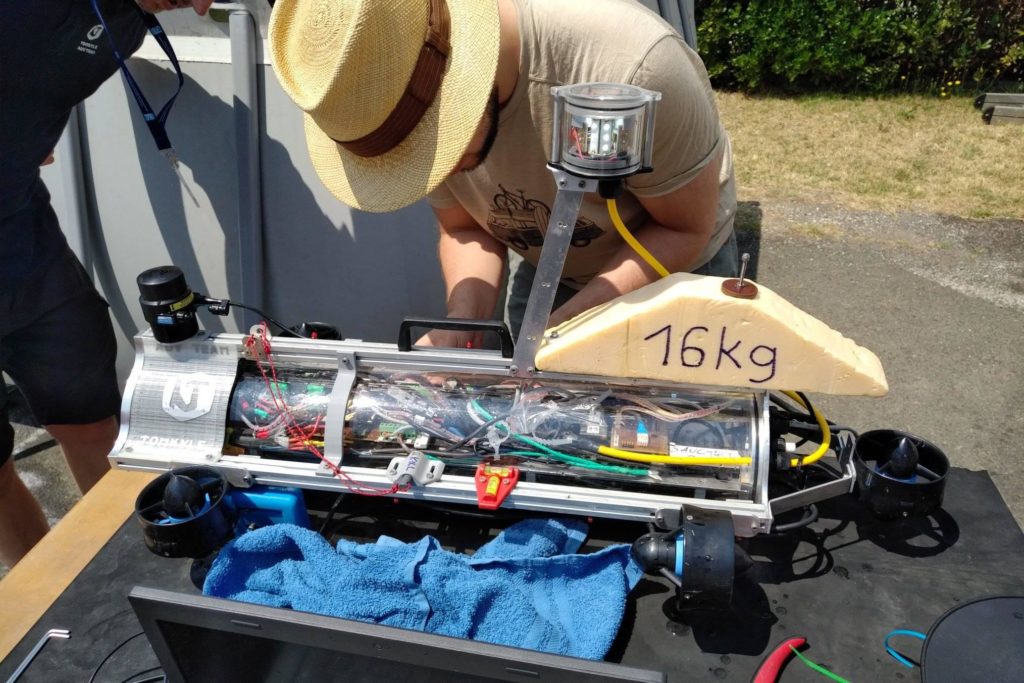
Insgesamt sind 5 Teams der Unterwasserdomäne angetreten: KN Robocik, SEAL, UNIFI Robotics, Team Bath Drones Marine und wir, das AUV-Team TomKyle. Nach einer 20 Stunden (!) Fahrt nach La Spezia sind wir am Samstag angekommen und haben unser Lager aufgestellt. An den darauffolgenden Tagen haben wir voller Vorfreude das Rucksack AUV auf seine Mission vorbereitet. Leider kam es hier bereits am zweiten Tag zum GAU: Wassereinbruch durch einen Riss im Kabel. Dies führte direkt zur Beschädigung unseres UPSQUARED Motherboards, dem Gehirn unseres Fahrzeugs. Glücklicherweise hatten wir unseren Veteran die Robbe131 dabei, mit der wir ebenso antreten konnten. Während dessen versuchten wir (erfolgreich), das Rucksack AUV mittels dem neuen Raspberry Pi wieder Fit zu machen. Wir konnten am letzten Tag sogar noch im Hafenbecken fahren und Daten sammeln.
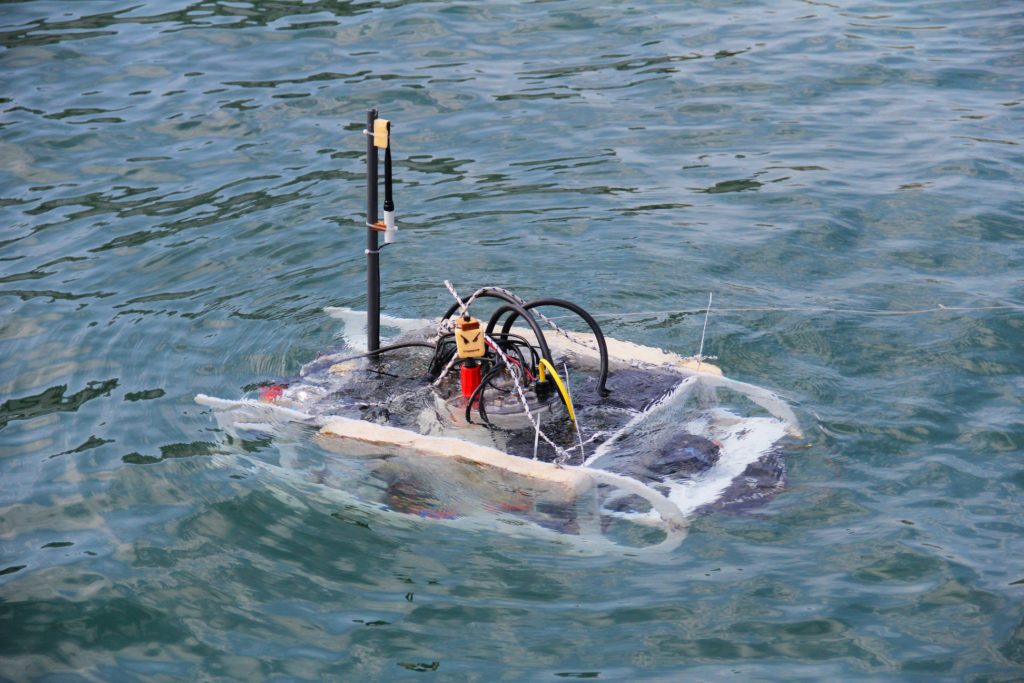
Auch mit der Robbe131 gab es kleine Komplikationen durch die starken Temperaturschwankungen, die zum minimalen Wasseinbruch führten. Die Robbe131 meisterte ansonsten die Missionen überwiegend wie geplant und konnte somit gut punkten.
Insgesamt holten wir uns 5 Preise, darunter die innovativste Ingenieursleistung für unser Laser-Altimeter System des Rucksack AUVs, welches in der Bachelorarbeit von Uwe entwickelt wurde. Dieses knapp 500€ teure System ersetzt ein etwa 25.000€ teures Doppler-Velocity Log – ein System, mit dem die tatsächliche Geschwindigkeit über dem Boden gemessen wird.

Alles in allem war der Wettbewerb eine gelungene Veranstaltung. Wir haben alte Bekannte wieder getroffen, neue Bekanntschaften geschlossen und die Teams haben sich gegenseitig unterstützt und beraten. Letztendlich geht es bei diesen Wettbewerben nicht nur um den Sieg, sondern um den Wissenstransfer, die Verknüpfung verschiedener Nationen und die Erprobung der Fertigkeiten im Team und des Fahrzeugs.
Wir danken recht herzlich den Veranstaltern des Wettbewerbs, dem CMRE, den anderen Teams, dem FuE Zentrum der FH Kiel für das Sponsoring und insbesondere Andreas von Telerob, der uns beim Wettbewerb unterstützt und durch seine Roboter einen Großteil zur Gesamtbewertung beigetragen hat. Trotz unseres Sieges heißt das noch lange nicht, dass wir uns darauf ausruhen – Im Gegenteil! Erste neue Verbesserungen und Algorithmen für mehr Autonomie sind in Planung. Wir warten gespannt auf den nächsten Wettbewerb.
